
移动配送机器人发布
DG-50移动配送机器人搭载agent开发多种skill 让完成复杂任务变为可能。Choya agent 让配送机器人 拥有了理解、规划、执行、记忆的完整 Agent 能力闭环。Choya Agent 内置丰富的原子能力 Skill.可拓展多种 场景的skill 广场。并在机器人硬件基础上开发了套面向AI与机器人专业的丰富课程体系 。 https://mp.weixin.qq.com/s/NYABrj-x9C2r6RO9z6e06A

移动机器人实验室建成投入使用
宠丫机器人与北经管合作开发的移动机器人实验室正式落成。实验室配备3套caster平台. 可同时满足20名学生的实验教学需求。该实验室将主要用于《轮式自主移动机器人》课程教学与科研活动。

2025冬季实践训练营
和中科院计算所老师合作,来自全国30所高校的100余名学生参加了本期培训。培训内容涵盖ROS操作基础、强化学习、自动驾驶、 具身智能VLA等核心技术。通过理论讲解与动手实践相结合的方式,帮助同学快速掌握平台使用与教学方法。

与学校达成战略合作
宠丫机器人与国内某公司达成协议,将为其提供多台定制版Caster Bot室内配送底盘。

河北科技学院宣讲
为河北科技学院300+专业学生普及AI和机器人相关专业知识。 签订后续相关战略合作。

提供户外机器人的定位导航方案
针对户外清洁机器人的定位与导航,提供户外定位、机器视觉相关的定位导航方案,提高定位准去率。 合作开发行人识别、路径规划等关键技术,助力企业提高竞争力。

全国各地高校暑期训练营
和中科院计算所刘老师合作,与来自全国30所高校的100余名学生培训。培训内容涵盖ROS操作基础、 机器人仿真、强化学习、自动驾驶、 端到端等机器人学的课程体系。助力学生对机器人学产生兴趣为长远发展铺垫。
助力实验室建设
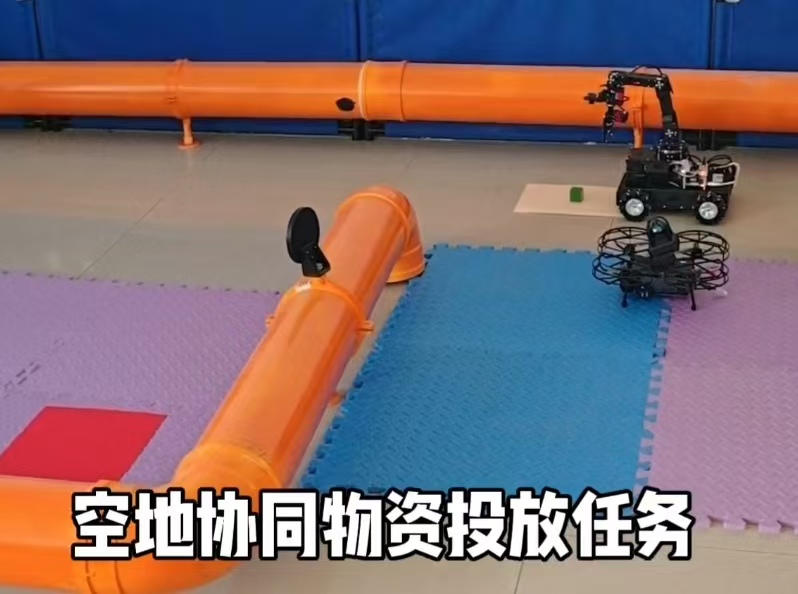
宠丫机器人与北京威斯博科技有限公司(VisBot)助力石油大学空地协同项目开发实验室建设。

合作建设
宠丫机器人与无人机创新技能大赛组委会达成合作,提供技术支持与指导和地面无人车助力空地协同 项目圆满完成。

合作建设
easymqos机器人分布式开发框架是宠丫机器人自研的一套机器人开发框架,其主要目的是摆脱ROS的繁杂配置和 TF变换带来的入门难度高的问题。使用easymqos机器人分布式开发框架就可以完成机器人感知、slam建图、A*路径规划 的基础入门知识,助力学生快速入门机器人学的基础研究。https://github.com/horo2016/easyMQOS
合作建设
如果你想DIY 一款轮式自主移动机器人,又不知道如何实现,本书可能会帮到你。 《轮式自主移动机器人编程实战》系统讲解轮式自主移动机器人如何从0 到1 实现自主运动。 以树莓派和STM32 单片机为例, 详细介绍轮式机器人的硬件结构, 包括驱动控制器的搭建、中央处理器的选型开发、滤波算法、平面 地图构建算法、规划算法、导航算法、 室外GPS 定位实战案例(异地远程控制和地图路径规划等)、 室内BreezySLAM 建图案例、ROS 开发案例等, 以及自主移动机器人和无人车驾驶的基本实现原理, 都能在本书中找到答案。 《轮式自主移动机器人编程实战》还提供开放的云平台路径规划,可在农田、工业园区巡检、物流送货等 场景测试。 《轮式自主移动机器人编程实战》可作为高等院校物联网、机器人、计算机、通信、电气及自动化等专业的教材, 也可作为计 算机、电子及智能车设计竞赛的自学或培训教材,还可供各类电子工程、自动化技术人员和计算机爱 好者学习参考。