RoundBot 基础版本
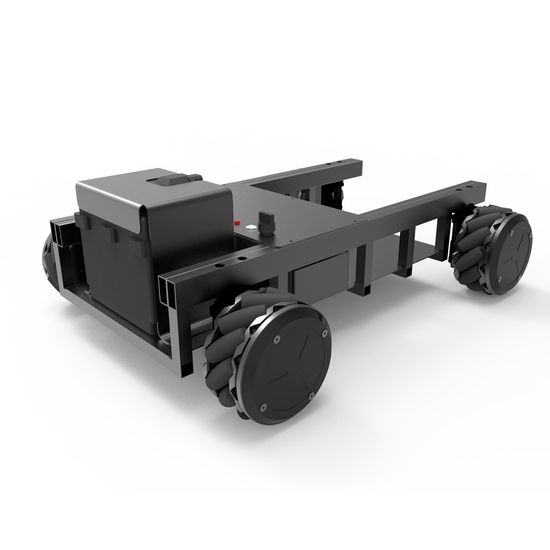
基于EasyMQOS的万向轮底盘,剥离ROS,直击算法核心
EasyMQOS + 自研算法
⚡ 剥离ROS配置困扰,直击算法核心
无需复杂的ROS环境配置,无需理解复杂的节点通信机制。 直接阅读、修改、运行算法源码,从底层理解SLAM与导航原理。
纯C++实现
无ROS依赖,标准C++编写,可在任意ARM平台直接编译运行
代码可读性强
模块化设计,单一文件实现核心算法,注释详尽,易于学习与修改
主控
STM32F4/ESP32
驱动
双轮差速+万向轮
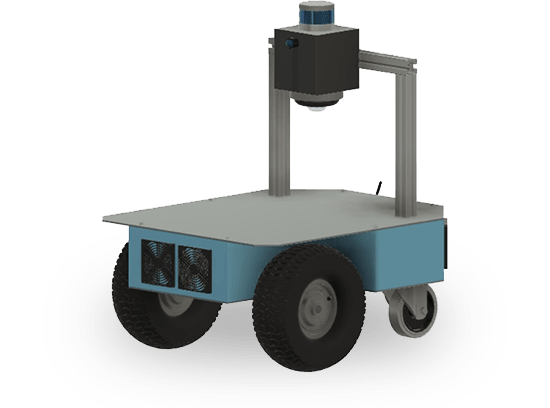
传感器
2D激光雷达
代码量
<5000行

breezy_myslam.cpp
核心算法示例
// 直接修改参数,无需Launch文件
void SlamConfig::load() {
map_resolution = 0.05; // 地图分辨率 5cm
scan_match_step = 0.02; // 扫描匹配步长
max_range = 8.0; // 雷达最大范围8米
// 自定义重定位逻辑...
}
BreezyMySLAM 算法架构
前端扫描匹配
基于ICP的轻量级点云配准,实时估计机器人位姿,计算复杂度低,适合嵌入式平台。
栅格地图构建
概率栅格地图更新,支持动态障碍物过滤,可直接生成PGM格式地图供其他平台使用。
蒙特卡洛重定位
自主实现的粒子滤波算法,支持 kidnapped robot 问题恢复,无需AMCL依赖。